Продолжим разговор о глиссировании надувных лодок. Здесь я хотел бы отметить, что ничего революционного и неизученного в движении надувных лодок нет. Всё происходит по общим законам гидродинамики.
 Причём надувная лодка по гидродинамическому качеству всегда проиграет одноразмерной лодке с жёстким корпусом того же веса. Связано это с самой конструкцией надувной лодки — глиссирующая пластина (дно) расположена между двух круглых баллонов, а, как известно, круглоскулые обводы практически не предназначены для режима глиссирования. Сама глиссирующая пластина, как и лодка в целом, представляет собой мягкую конструкцию, подверженную деформации при движении, что в свою очередь также увеличивает сопротивление движению.
Причём надувная лодка по гидродинамическому качеству всегда проиграет одноразмерной лодке с жёстким корпусом того же веса. Связано это с самой конструкцией надувной лодки — глиссирующая пластина (дно) расположена между двух круглых баллонов, а, как известно, круглоскулые обводы практически не предназначены для режима глиссирования. Сама глиссирующая пластина, как и лодка в целом, представляет собой мягкую конструкцию, подверженную деформации при движении, что в свою очередь также увеличивает сопротивление движению.
Для начала попробуем разобраться в терминологии. Для этого надо помнить — все режимы определяются скоростью движения лодки и зависят от скорости напрямую. Итак, лодка имеет три режима движения.
Режим плавания, он же водоизмещающий. Название происходит от того, что в этом режиме на лодку наибольшее влияние оказывает гидростатическая сила. Скорости движения — до 10—12 км/ч. Если скорость увеличить, на лодку начнут оказывать влияние и гидродинамические силы, существенно возрастёт сопротивление движению и, при недостатке мощности мотора, прирост скорости будет связан с неоправданными энергозатратами.
Переходный режим, или режим неустойчивого движения. С дальнейшим увеличением скорости движения на лодку возрастает влияние гидродинамической силы, и сопротивление движению существенно увеличивается. Лодка получает значительный дифферент на корму. Происходит это, пока скорость лодки не дойдёт до определённой точки — пика сопротивления, когда гидростатическая и гидродинамическая силы уравниваются. Пик этот для большинства надувных лодок расположен на скоростях движения около 18 км/ч и почти не зависит от килеватости и типа днища лодок. Данные получены при тестировании надувных лодок «Смарт», «Викинг» и «Касатка», причём скорость практически не зависела от загрузки лодок. Мы, в «Посейдоне», регулярно проводим тесты лодок своих и других марок для снятия скоростных характеристик с различной загрузкой. В планах — снятие буксировочных характеристик, что позволит более детально изучить процесс и сделать более точные выводы.
 С дальнейшим ростом скорости дифферент в корму уменьшается, сопротивление движению начинает уменьшаться за счёт увеличения доли гидродинамической силы, и энергозатраты уменьшаются. Лодка начинает разгоняться. Здесь есть один момент, на который я хочу обратить внимание. Хотя пик сопротивления пройден, до режима глиссирования, и тем более для режима чистого глиссирования, ещё далеко. Дело в том, что кривая падения сопротивления для разных лодок не одинакова. Плоскодонные лодки имеют более крутой график падения сопротивления, более килеватые — более пологий. Любое увеличение сопротивления движению, к примеру, увеличение волнения, ветровой нагрузки или интенсивное маневрирование, может вызвать снижение скорости лодки и отбросить её назад, к пику сопротивления. Именно по этой причине данный режим и носит название режима неустойчивого движения.
С дальнейшим ростом скорости дифферент в корму уменьшается, сопротивление движению начинает уменьшаться за счёт увеличения доли гидродинамической силы, и энергозатраты уменьшаются. Лодка начинает разгоняться. Здесь есть один момент, на который я хочу обратить внимание. Хотя пик сопротивления пройден, до режима глиссирования, и тем более для режима чистого глиссирования, ещё далеко. Дело в том, что кривая падения сопротивления для разных лодок не одинакова. Плоскодонные лодки имеют более крутой график падения сопротивления, более килеватые — более пологий. Любое увеличение сопротивления движению, к примеру, увеличение волнения, ветровой нагрузки или интенсивное маневрирование, может вызвать снижение скорости лодки и отбросить её назад, к пику сопротивления. Именно по этой причине данный режим и носит название режима неустойчивого движения.
Режим динамического поддержания, или режим глиссирования. Сопротивление движению уменьшается за счёт снижения гидростатической составляющей, скорость растёт, а энергозатраты уменьшаются. Происходит это, пока лодка не войдёт в режим чистого глиссирования, когда гидростатическая составляющая приближается к нулю. Эта скорость будет самой экономичной. Именно здесь можно убрать газ на треть и остаться в режиме глиссирования. Скорость эта для разных лодок может быть в пределах от 27 до 30 км/ч и зависит от загрузки.
Что же происходит с лодкой далее при увеличении скорости? Сопротивление трению начинает расти, для увеличения скорости требуются всё большие энергозатраты. При наличии двигателя достаточной мощности скорость лодки может быть увеличена только до определённого предела — предела устойчивости, когда лодка начинает терять управляемость, появляется сначала поперечное, а потом продольное раскачивание. Для разных типов лодок он, естественно, разный. Первыми предела устойчивости достигнут лодки с плоским днищем.
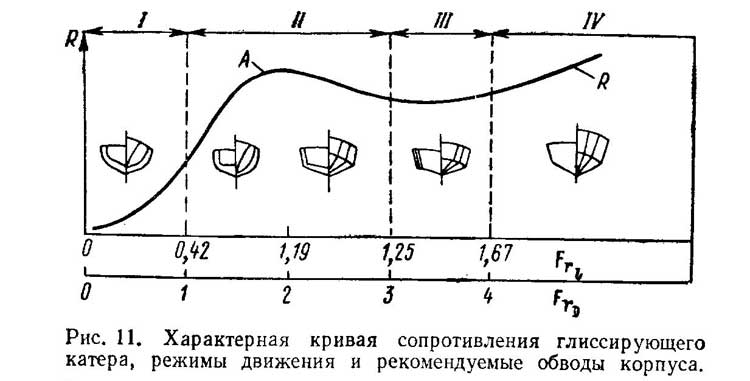 Это с точки зрения теории и практики. Я специально попробовал рассказать о режимах движения без использования формул и графиков. Любознательные могут ознакомиться с теорией, например, в книге «Справочник по малотоннажному судостроению» Б. Г. Мордвинова, вполне доступно и написано хорошим, на мой взгляд, языком. Для общего развития — график сопротивления движению выглядит так (см. рис.11).
Это с точки зрения теории и практики. Я специально попробовал рассказать о режимах движения без использования формул и графиков. Любознательные могут ознакомиться с теорией, например, в книге «Справочник по малотоннажному судостроению» Б. Г. Мордвинова, вполне доступно и написано хорошим, на мой взгляд, языком. Для общего развития — график сопротивления движению выглядит так (см. рис.11).
Несколько слов о практических наблюдениях и решениях. Во-первых, всегда проверяйте давление в отсеках лодки, особенно в кильсоне, он наиболее подвержен изменению давления от температуры — не докаченные баллоны и кильсон увеличивают деформацию лодки при движении. Во-вторых, тщательная навеска мотора и подбор оптимального винта способны уменьшить сопротивление и повысить КПД движителя. Стоит помнить: самые скоростные винты — стальные. В-третьих, имеет значение правильное расположение груза в лодке: максимальные скорости достигаются при кормовой загрузке, быстрый выход в режим глиссирования — при носовой.
 И последнее, мои собственные наблюдения и выводы. Некоторые отличия достигнутых величин скоростей надувных лодок от теоретических, расчётных величин связаны с таким явленияем, как аэрация днища. Форма днища в сочетании с вклейкой в баллон надувной лодки такова, что при движении днище лодки хорошо аэрируется, что положительно сказывается на снижении сопротивления движению. Данный вывод подтверждает мой эксперимент по установке продольных реданов на надувной корпус. Прирост составил примерно 10% максимальной скорости. Для тех, кто захочет этот опыт повторить, скажу: расположение и размер реданов требуют точной настройки и многократных экспериментов, причём для заданной загрузки. С изменением загрузки эффект существенно снижается, следовательно, это решение не универсально.
И последнее, мои собственные наблюдения и выводы. Некоторые отличия достигнутых величин скоростей надувных лодок от теоретических, расчётных величин связаны с таким явленияем, как аэрация днища. Форма днища в сочетании с вклейкой в баллон надувной лодки такова, что при движении днище лодки хорошо аэрируется, что положительно сказывается на снижении сопротивления движению. Данный вывод подтверждает мой эксперимент по установке продольных реданов на надувной корпус. Прирост составил примерно 10% максимальной скорости. Для тех, кто захочет этот опыт повторить, скажу: расположение и размер реданов требуют точной настройки и многократных экспериментов, причём для заданной загрузки. С изменением загрузки эффект существенно снижается, следовательно, это решение не универсально.
Есть ещё один косвенный признак наличия аэрации днища — датчик эхолота. Правильно выставленный, но смещённый к баллону лодки на высоких скоростях практически не работает. Как раз из-за наличия воздуха в потоке.
А. Кулагин,
эксперт компании «Посейдон»